
- World's Leading Trade FairLASER World of PHOTONICSJun. 24-27, 2025
- Parallel eventsWorld of Photonics CongressJun. 22-27, 2025
- Trade fair networkChinaMar. 11-13, 2025
International Congress on Photonics in Europe
New impetus and a comprehensive insight into the world of photonics research
Details of the World of Photonics Congress 2023
The most important contacts for attending the World of Photonics Congress and answers to general questions
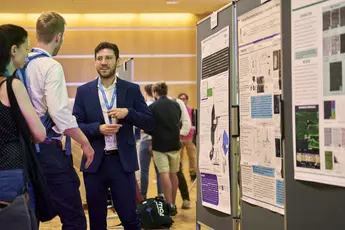
Every two years in June, the international scientific elite meets in Munich to gather information about lighthouse projects in photonics and laser research. The World of Photonics Congress is held in conjunction with the leading trade show in photonics—the LASER World of PHOTONICS and since 2023 together with the World of QUANTUM.
All aspects of research—from fundamental and application-based scientific topics to the latest laser and photonics applications in industry and medicine—are presented and discussed in scientific conferences and a practice-oriented series of application panels. The latest milestones in photonics research on the one hand, and a concentrated showcase of the photonics industry on the other: This concept allows participants to experience a unique combination of science, innovative technologies and industrial application sectors.

Official press photos and logos in print-ready resolution are available in the media database of Messe München, which also features a keyword search function.
Please observe the Terms of Usage that apply to all photographs from Messe München.





















The partners of the WORLD of PHOTONICS CONGRESS are the leading scientific associations for photonics research. They ensure the quality of the lectures:







